
Jun 25, 2024
June 25, 2024
Authors: Liisa Pesonen, Natural Resources Institute Finland (Luke), Finland; Daniel Calvo Alonso, Atos, Spain; Juha Backman and Jere Kaivosoja, Natural Resources Institute Finland (Luke), Finland; Jarmi Recio Martinez, Atos, Spain; and Juha-Pekka Soininen, VTT Technical Research Centre of Finland, Finland
Note: The below is an excerpt from ‘Advances in connectivity and distributed intelligence in agricultural robotics’ which features as Chapter 8 in the book Advances in agri-food robotics.
Introduction
Robots can be used in several types of farms to assist or replace human work in heavy, dangerous, dull or high accuracy needing tasks, or when the availability of labour is limited (Basri et al., 2021). Automatic milking systems (AMS), also called milking robots, are widely used service robots in livestock farming, together with increasingly common feeding and cleaning robots (John et al., 2016; Stülpner et al., 2014). In horticulture, several different approaches for harvesting robots in greenhouses have been introduced (Bachche, 2015), and farm implementations are gradually gaining ground. Weeding and pest control robots have been developed for orchards and vineyards (Horizon The EU Research and Innovation Magazine).

Diverse pot- and bin-handling robots for both greenhouses and orchards have been designed to assist in heavy and monotonic tasks (Ye et al., 2018). Also in arable farming, several commercial field robots have been introduced and are available in markets: drones for remote sensing and ground robots capable of harrowing, weeding, fertilising and seeding (e.g. AgroIntelli, FarmDroid ). However, the adoption of robotic systems in use has been slow in arable farming.
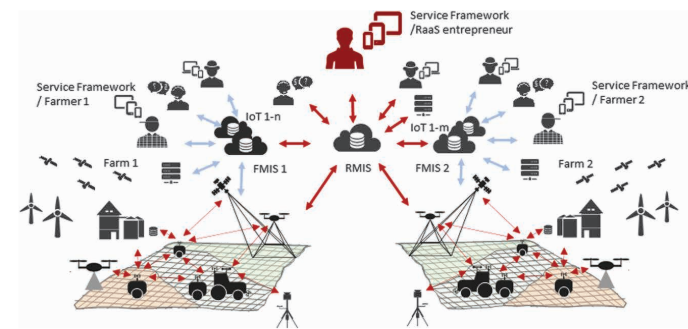
Meaningful use of robots in farms requires smart, user-friendly and the circumstance-adaptive applications. This is difficult to achieve since farms are demanding worksite environments for autonomous machines. Farm operations link with several farm tasks, heterogeneous machinery and decision support systems and people and animals (Fountas et al., 2015; Köksal and Tekinerdogan, 2019).
Agricultural robots need to be well connected with other actors in the farm operations they execute as well as with supporting services (Berenstein and Edan, 2017; Vasconez et al., 2019; Anagnostis et al., 2021). Robots also need to mediate data from their operations for further use in food systems since today’s data-driven food systems require data or data-based information from agriculture about its production processes, i.e. field operations and production environments to function efficiently and safely, and to improve sustainability in a documented manner (Miranda et al., 2019; Corallo et al., 2018).
For better adoption, especially smallholders benefit from robotic systems that provide well-tailored, easy-to-use system entities. Smallholders have limited economic capacity to employ workers, especially when the labour is needed only seasonally. Usually, the farmer himself executes the main part of farm tasks and takes care of farm management and businesses in parallel. To be useful working partners, the robots, as any automation system, need to be well connected to other farm systems and to the robot’s maintenance systems, and the provision of the robot’s services needs to fit well to often individual farm circumstances and farmer’s preferences (Pesonen et al., 2008).

In this sense, operation environments in arable farming set the most challenging flexibility and configurability demands for robot systems. Arable farms vary in crop selection, production strategies and methods, farm size and technological infrastructure thereof. Arable fields concern large land areas in diverse topographic and (micro)climate environments (The World Bank ). Thus, the operational environments in arable farming cannot be standardised in a way it is possible in indoor animal production or greenhouses. Farm fields locate often in rural areas and in the distance from a farm’s physical operation centre, which challenges functions for monitoring, control and logistics of robot systems. There is no electricity network available in the fields, and since arable fields are operated with moving machines, the needed communication requires always wireless connections. Arable farming worksites are open environments that expose robots to varying weather conditions; moving obstacles like people, animals and other machines; and suddenly changing working partners due to which connections to supporting services are essential (Steen et al., 2012; Kaloxylos et al., 2012; Goap et al., 2018). The ability to carry out rapid reactions and proportionate changes in plans challenges not only the connections to supporting network of services and other machines but also the intelligence of robot systems. Thus, this chapter focusses mainly on arable farming and issues encountered there.
• farm tasks, which include from a farm or field viewpoint what task should
be done, where and when;
• fleet tasks, which indicate the allocation of farm tasks to different robots;
• robot tasks, which contain waypoints for navigation, mission parameters
and main actions; and
• detailed robot tasks containing detailed instructions for the robot’s
actuators.
Want to keep reading? Read the full chapter here.
- Interested in exploring the other chapters that feature in Advances in agri-food robotics? Enter code BOOK20 at checkout via the BDS website to redeem 20% off your purchase.